Abstract
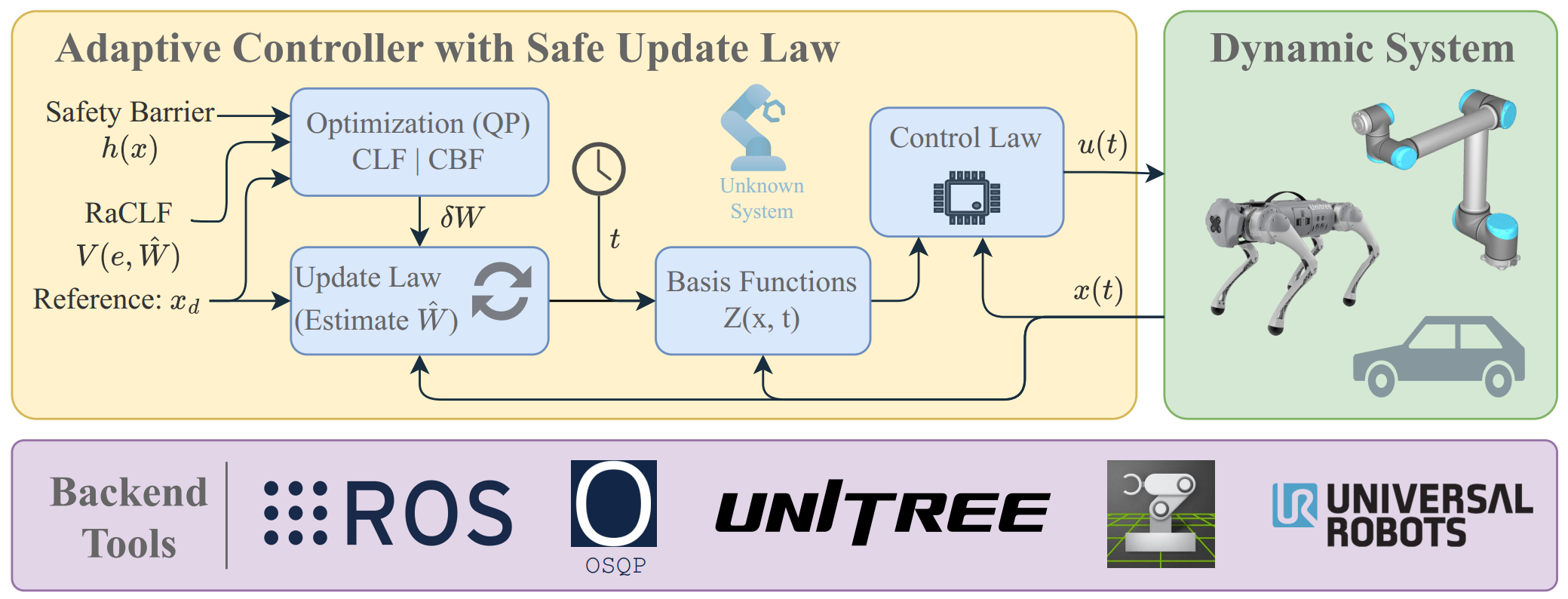
Adaptive controllers offer powerful tools for controlling nonlinear systems with parametric uncertainties, yet ensuring safety, particularly during the initial learning phase, remains a significant challenge. Conventional safety approaches often rely on filtering the control output using Control Barrier Functions (CBFs), which may fail to prevent unsafe behavior when parameter estimates are poor and can lead to overly conservative actions. This paper introduces a novel framework that directly integrates safety constraints into the parameter adaptation process itself. We propose enforcing safety by modulating the parameter update law through a minimally invasive perturbation, calculated via a real-time Quadratic Program (QP). This QP incorporates constraints derived from both a Robust Adaptive Control Lyapunov Function (RaCLF), ensuring system stability, and a CBF, guaranteeing forward invariance of a safe set. Critically, the CBF constraint leverages a formally derived, time-varying upper bound on the parameter estimation error, mitigating conservativeness as the system learns. We provide rigorous proofs for the stability of the closed-loop system and the validity of the safety constraint. The efficacy and practicality of the proposed safe parameter update strategy are demonstrated across diverse platforms, including numerical simulations of a mass-damper system and a mobile robot, high-fidelity simulation of a UR10 manipulator, and hardware experiments on a quadrupedal robot navigating amidst obstacles.
Numerical Simulations
We first validate our framework on two simple nonlinear systems. The first simulation showcases the controller's ability to learn the unknown dynamics of a nonlinear mass-damper system while maintaining stability. The second demonstrates the effectiveness of the safety constraints as a mobile robot successfully navigates through an environment with obstacles, proving the controller's capability to guarantee forward invariance of a safe set while learning the controller parameters.
Nonlinear Mass-Damper System
Simulation of a mass-damper system with nonlinear dynamics, demonstrating the controller's ability to learn and stabilize the system safely.
Mobile Robot Navigation
A single-integrator mobile robot navigating in an environment while avoiding obstacles, showcasing the safety guarantees.
High-Fidelity UR10 Simulation
To test our method in a more complex and realistic environment, we use Nvidia's IsaacSim to simulate a UR10 robotic arm. The comparison starkly illustrates the necessity of our safe parameter update law.
The robot is tasked to loop between the three points denoted by spheres in the simulation. When one of the spheres is denoted as the center of an unsafe region, the UR10 fails to complete the task without our safety filter, violating the safety constraints. In contrast, with our proposed safety filter active, the UR10 successfully and safely performs the task while respecting all constraints.
Without Safety Filter
The UR10 manipulator completes the task but violates safety constraints when the proposed safety filter on the parameter update is deactivated.
With Safety Filter
With our safety filter active, the UR10 arm successfully and safely performs the task, respecting all constraints.
Hardware Experiments: Quadruped Robot
The practicality and robustness of our proposed framework are demonstrated through hardware experiments on a quadrupedal robot. Navigating in a cluttered environment, the robot effectively avoids obstacles, validating the controller's performance on a physical system with unmodeled dynamics and real-world noise. The long-duration timelapse further showcases the controller's reliability and repeatability over extended operational periods, confirming its suitability for real-world deployment.
Top view of the hardware test
Side view of the hardware test
A 15-minute timelapse showing the robustness and repeatability of the safe learning process.
BibTeX
To be updated after acceptance:
@article{Sinaei2026Safe,
title={Safe Adaptive Control with Vanishing Conservativeness for Robotic Systems with Unknown Dynamics Via Barrier Functions},
author={Sinaei, Kasra and Ebeigbe, Donald},
journal={IEEE robotics and automation letters},
year={2026},
publisher={IEEE}
}